
 |
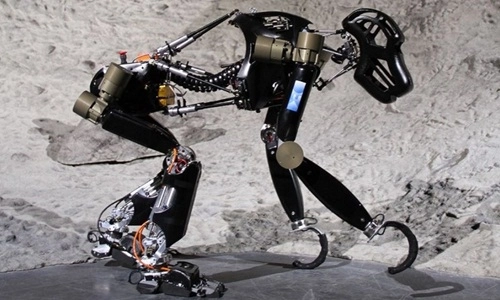
| Mẫu robot vượn thám hiểm mặt trăng do Trung tâm Nghiên cứu Trí tuệ Nhân tạo của Đức phát triển. Ảnh: DFKI |
dfki hy vọng mẫu thiết kế robot mới của họ, với tên gọi iStruct Demonstrator, biệt danh "Charlie", có khả năng đạt được sự ổn định và tính linh hoạt của loài vượn khi leo trèo, di chuyển trên nhiều địa hình khác nhau.
"Chúng tôi lựa chọn loài vượn để có thể nghiên cứu được nhiều chế độ vận động hơn", CNN dẫn lời Daniel Kuhn, chuyên gia tại DFKI, cho biết. "Chúng có khả năng đi trên 4 chân rất vững nhưng vẫn đứng được bằng hai chân sau và sử dụng hai chân trước để cầm nắm, leo trèo. Khả năng thay đổi tư thế linh hoạt của loài vượn khiến chúng tôi cảm thấy rất thích thú", ông nói thêm.
Lợi thế lớn nhất của loài vượn là chúng có thể chọn cách di chuyển phù hợp với từng điều kiện cụ thể. "Nếu môi trường không cho phép đi lại trên hai chân, chúng có thể chuyển sang đi bằng 4 chân. Khi môi trường thay đổi, việc đi trên hai chân sẽ giúp chúng có tầm nhìn tốt hơn", Kuhn giải thích.
Được thực hiện bởi cơ quan không gian DLR, Đức, dự án này còn xây dựng cả một môi trường mặt trăng giả định để kiểm tra các mẫu thử nghiệm.
"Nhìn chung, chúng tôi hài lòng với kết quả", Kuhn nói. "Robot của chúng tôi có thể leo dốc nghiêng khoảng 20 độ. Hiện tại, chúng tôi đang tiếp tục nghiên cứu cách để chuyển đổi từ tư thế bốn chân sang hai chân".
Hầu hết các loại robot trước đây đều chỉ trang bị hệ thống chân kết nối đơn điểm nhằm đơn giản hóa thiết kế và điều khiển. Nhưng mẫu robot của DFKI lại được chú trọng phát triển một cơ cấu chi tinh vi để mô phỏng hoạt động phức tạp của loài vượn. Robot còn được lắp đặt nhiều thiết bị cảm ứng khác nhau để giúp chúng thu thập thông tin hiệu quả hơn.
Đặc biệt, "Charlie" là một trong những mẫu robot đầu tiên có cột sống. Chúng đủ khỏe để nâng đỡ trọng lượng cơ thể robot và mang thêm từ 20 đến 25 kg.
Các loại robot thám hiểm mặt trăng cần thực hiện tương đối nhiều chức năng khác nhau. Chúng không chỉ quan sát, khoan, mài, tìm kiếm, sàng lọc các loại vật chất, mà còn phải di chuyển trong một môi trường chân không với nhiều điều kiện khắc nghiệt. Ngoài ra, robot cũng phải có khả năng tự sửa chữa nếu xảy ra vấn đề.
Theo Kuhn, mẫu "Charlie" hiện tại cần tiếp tục nghiên cứu và phát triển qua từ ba đến 4 đời nữa thì mới có thể đưa vào hoạt động trên thực địa ngoài không gian.
Robot vượn "Charlie" thay đổi tư thế
Vũ Hoàng