Nguyên lý ăn khớp bánh răng sóng mới được B. Masser đưa ra vào năm 1959. Đây là cơ cấu áp dụng nhiều trong công nghệ robot vì có tỷ số truyền lớn, có thể thay đổi tỷ số truyền, nhưng lại rất nhỏ gọn.
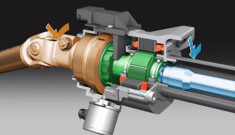
Bộ truyền bánh răng sóng gồm một cặp bánh răng ăn khớp trong. Vùng tiếp xúc của cặp bánh răng đối xứng nhau. Bánh răng phía trong có khả năng biến dạng đàn hồi dưới tác dụng của cơ cấu tạo sóng có dạng e-lip. Cụm truyền động có 2 bậc tự do, với tỷ số truyền có thể thay đổi. Lợi dụng đặc tính trên, Audi đã tạo ra một số hộp số có tỷ số truyền động điều khiển điện tử thông qua động cơ điện mang tên DSS (Dynamic Steering System).
 |
| Hệ thống lái động lực học trên xe Audi. |
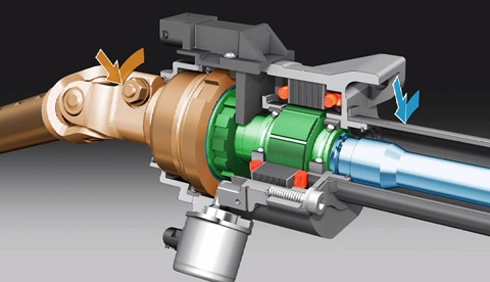
Bánh răng bao liên kết với cơ cấu lái phía dưới, trong khi đó trục lái từ vô-lăng gắn vào bánh răng biến dạng đặt bên trong. Động cơ EC quay làm thay đổi vị trí hai vùng ăn khớp đối xứng nhau, tốc độ động cơ thay đổi làm tỷ số truyền lực thay đổi theo.
Trên xe sử dụng cơ cấu cấu lái truyền thống, tài xế thường phải vê vô-lăng nhiều vòng mới đạt được góc quay bánh xe cần thiết khi đi trong phố hoặc vào chuồng. Điều này gây ra một số khó chịu, cản trở sự tập trung quan sát đường. Ngược lại khi ở tốc độ cao, hệ thống có độ nhạy cao làm tăng nguy cơ lái thừa hoặc lái thiếu.
Trên hệ thống lái động linh hoạt, bộ điều khiển trung tâm sẽ thay đổi tỷ số truyền động của cặp bánh răng sóng, làm tỷ số truyền động của toàn thệ thống thay đổi theo.
Vận tốc là một trong những tham số trạng thái quan trọng để bộ điều khiển tính toán ra tỷ số truyền thích hợp. Ở tốc độ thấp hoặc trung bình, xe ở chế độ truyền động trực tiếp với tỷ số cao. Bánh dẫn hướng đã đạt được góc xoay cần thiết chỉ với góc đánh lái nhỏ thay vì phải xoay vô-lăng nhiều.
Nhưng khi xe đạt đến tốc độ giới hạn, tỷ số truyền giảm xuống thấp, độ nhạy của toàn hệ thống giảm. Điều này cho phép duy trì sự ổn định của xe tốt hơn. Theo Audi Việt Nam, hiện nay hệ thống lái này được cài đặt như là một tùy chọn.
| >> Video nguyên lý hoạt động hệ thống lái linh hoạt |
Thế Hoàng